
Роботы, особенно человекоподобные, не могут оставить равнодушными даже тех людей, которые мало интересуются современными технологиями. Наверное, программирование таких роботов очень интересное и увлекательное занятие. Так оно и есть, только вот мало кто знает, как трудно научить робота даже самым простым вещам, которые нам кажутся совершенно естественными. Вы бы и сами смогли в этом убедиться, если бы имели доступ к современной робототехнике.
Программирование роботов сегодня — прерогатива узких специалистов, а всем остальным, кто интересуется робототехникой, остаётся либо молча завидовать, либо удовлетворяться работой с симуляторами, например, V-REP — робосимулятором, разработанным швейцарской компанией Coppelia Robotics. Впрочем, почему бы и нет? Система V-REP обладает на удивление широким функционалом, поддерживается несколькими операционными системами, включая Windows, а самое главное — бесплатна для домашнего использования. А ещё в ней имеются библиотеки для программирования роботов с помощью C/C++, Python, Java, Matlab и некоторых других языков.
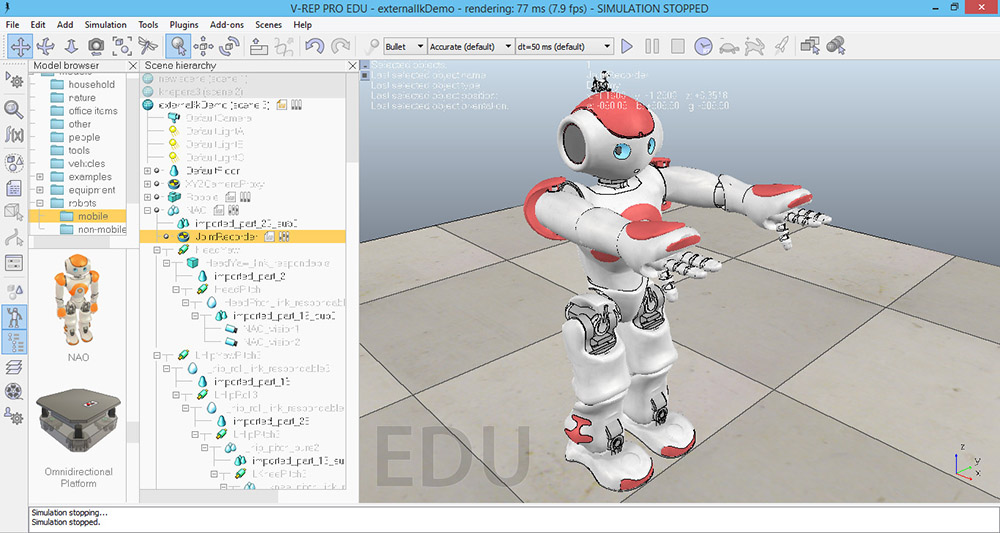
V-REP поставляется с набором готовых моделей — стационарных и мобильных роботов, управлять которыми можно редактируя скрипты. Для управления некоторыми моделями имеются специальный набор ползунков. Все роботы уже имеют базовую программу и подчиняются реальным законам физического мира, той же гравитации. Распространяется платформа в трёх редакциях: EVAL, EDU и Player. Первая — полнофункциональная версия без ограничений, вторая — образовательная версия с лицензионными ограничениями, ориентированная на школьников старших классов, студентов и просто увлеченных пользователей. Плеер (Player) — это программа, предназначенная для запуска сцен, созданных в профессиональной версии. Возможность редактирования скриптов в ней отсутствует.
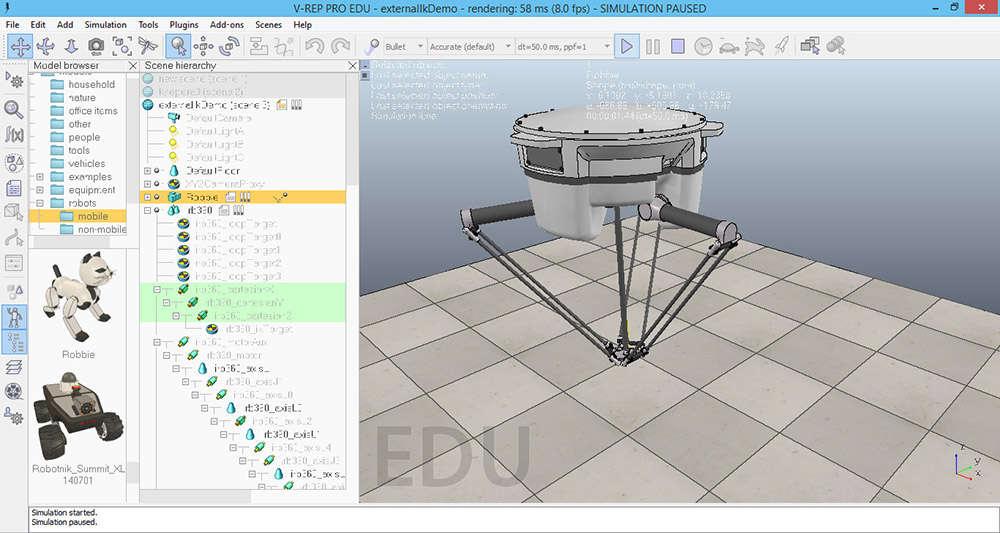
Для знакомства с платформой вполне подойдёт второй вариант — V-REP PRO EDU. Устанавливается робосимулятор как обычная программа. После запуска вы увидите окно, разделённое на три части.
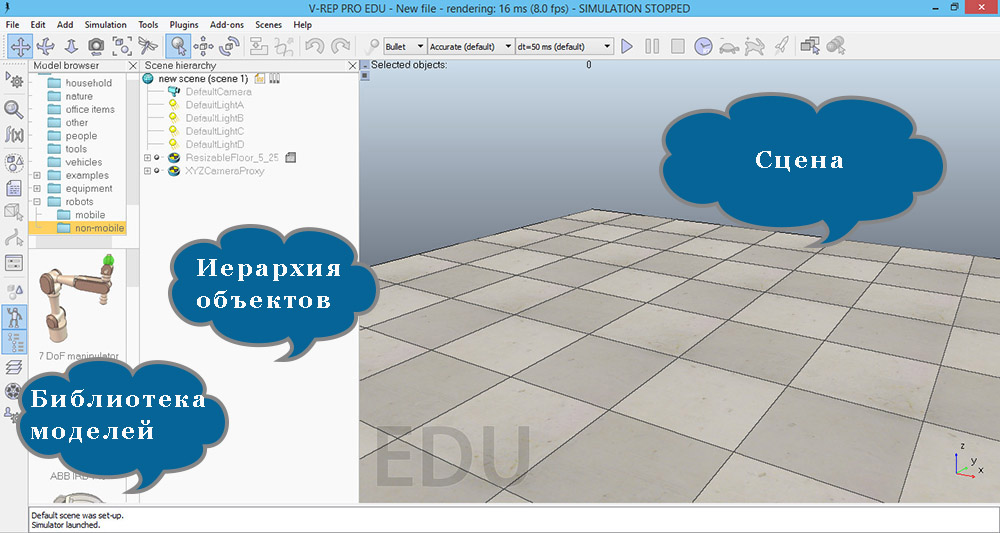
Правая и самая большая область — это масштабируемая сцена, где и происходят все действия. У левого края размещается библиотека объектов — роботов, а также различных дополнительных элементов, что-то вроде реквизита. Средняя панель содержит иерархию объектов — сцены, камеры, фигуры, источники света, модели и управляющие ими скрипты.
Как работать с V-REP
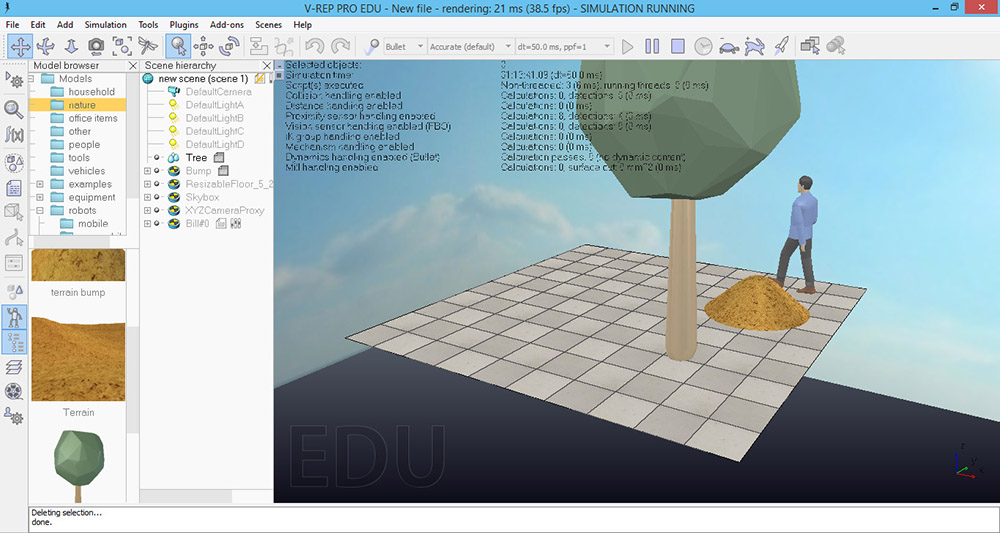
На первый взгляд всё просто — перетаскиваем из библиотеки на сцену модель, жмём кнопку Play и наблюдаем за движениями подопечного. Некоторые модели довольно умны, например, «человек» Bill прекрасно понимает, как обходить препятствия, где находятся границы поверхности сцены и что нужно делать, чтобы не свалиться в «пропасть».
А вот человекоподобный робот Ansi будет идти по прямой, пока не упадёт за край и не распрощается с жизнью.
Будучи предоставленными сами себе, роботы бродят вслепую, сталкиваются и падают, а упав на поверхность, неуклюже и беспомощно перебирают конечностями.
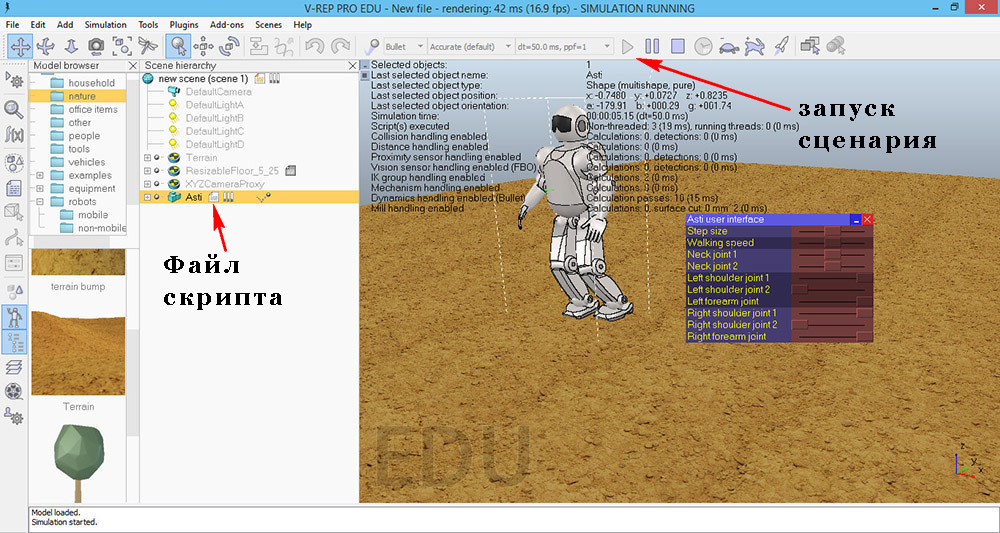
Ваша задача — обучить их, но для этого потребуется знание базовых основ программирования, в идеале — языка Lua, ведь именно на нём написаны внутренние скрипты V-REP. Открыть исходный код управляющего скрипта очень просто — нужно лишь дважды кликнуть по иконке «файл» в колонке иерархии объектов.
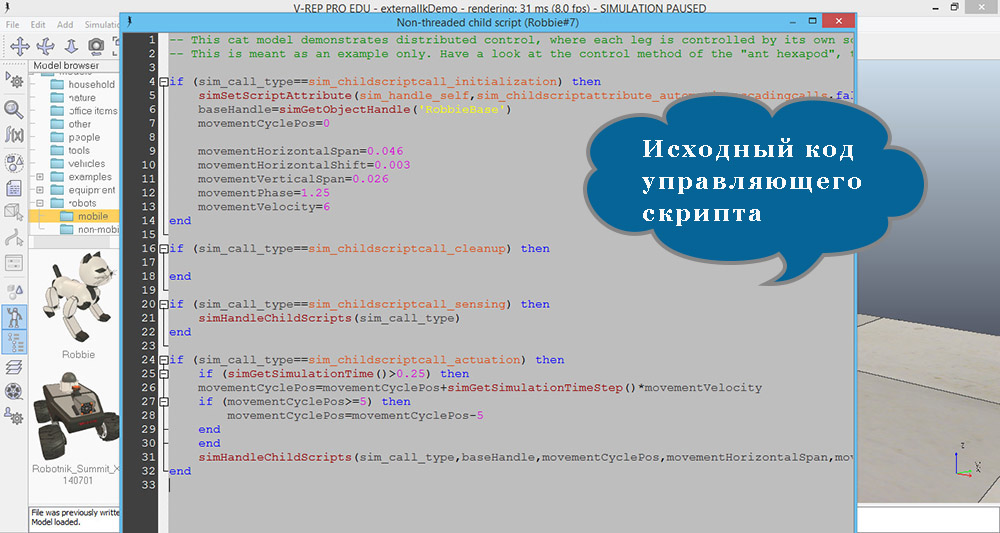
Ради интереса можете поэкспериментировать, изменяя значения параметров, а затем наблюдая за поведением роботов. Имеется в V-REP также неплохой набор готовых примеров — сцен в формате ТТТ, получить доступ которым можно через главное меню File –> Open scenes.
Работая с системой, профессиональным программистом роботов вы, может быть, и не станете, зато представление о процессе программирования искусственного интеллекта получите гарантировано. Да ведь и надо с чего-то начинать. Так вот начните с V-REP, для этих целей он вполне подходит. По большому счёту, если вы знакомы с основными управляющими конструкциями языков программирования, разобраться с робосимулятором не составит для вас большого труда.
Добавить комментарий